РЕШЕНИЕ (файл) вывод, красное-белое:
Дисциплина:
Формат файла:
PDF
Ключевые слова:
- учебник
- учебное пособие
Год:
- 2013
Количество страниц:
282
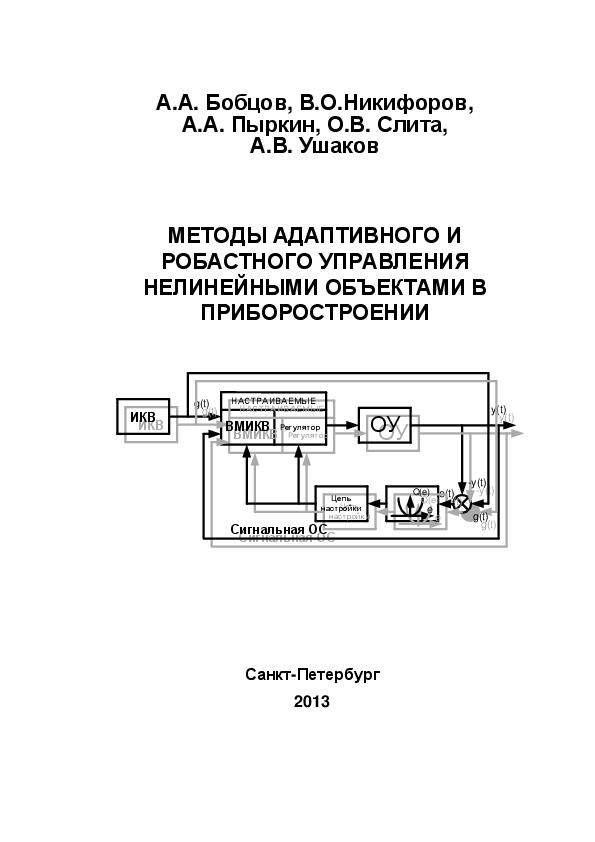
В учебном пособии освещены проблемы обеспечения робастности траекторий движения и показателей качества систем управления с нелинейными объектами в их составе при управлении в условиях неопределенности в классе непрерывных по времени представлений. Материал пособия опирается на методы интервальной линеаризации нелинейных объектов, теории чувствительности, интервальных модельных представлений, обобщенных модального и изодромного с использованием концепции настраиваемой внутренней модели управлений, функций Ляпунова, Харитонова и адаптивного управления. При конструировании законов управления, доставляющих системам робастность в смысле основных показателей качества их функционирования, используются возможности как неадаптивных, так и адаптивных методов ее обеспечения.Учебное пособие предназначено для использования в магистерском цикле образования по профилям подготовки: 200100 "Приборостроение", 221000.68.02 "Интеллектуальные технологии в робототехнике" направления подготовки 221000 "Мехатроника и робототехника". Оно также полезно аспирантам и специалистам, обучающимся и работающим в области теории и практики робастного и адаптивного управления.Рекомендовано УМО вузов РФ по образованию в области приборостроения и оптотехники в качестве учебного пособия межвузовского использования для студентов по профилю подготовки магистров 200100 "Приборостроение".
